¿Cómo funcionan los coches autónomos? ¿Están realmente preparados para circular?
La implantación de los coches autónomos es el objetivo más inmediato de los principales constructores automovilísticos. A día de hoy ya se han realizado diferentes pruebas de conducción en tráfico real, y muchas de las tecnologías que se emplearán en los coches del futuro ya las podemos ver en los vehículos actuales: frenada asistida, control de mantenimiento de carril, reconocimiento de señales… Y, aunque son elementos cada vez más habituales, todavía no es viable hablar de conducción completamente autónoma, o lo que también se conoce como nivel 5: conducción 100% autónoma.
¿Qué necesita un coche para ser autónomo?
Para que un vehículo funcione correctamente sin la intervención de una persona, necesita una serie de diferentes tecnologías, tanto hardware como software, que capten e interpreten el entorno del vehículo y puedan procesar toda esa información de una manera inmediata para tomar las decisiones correctas.
La mayoría de los sensores que utilizan los prototipos de vehículos autónomos no son complejos y ya se utilizan en otras industrias, como por ejemplo la telefónica.
¿Qué tipos de sensores utilizan?
Radares. Estos sensores de radio emiten ondas electromagnéticas que revelan la posición exacta de un obstáculo y lo rápido que éste se aproxima al vehículo. Uno de los problemas de estos sensores es que solo captan información en 2D y la altura se convierte en un factor clave, aunque ya se trabaja en radares 3D que capten mayor cantidad de información.
Sensores de ultrasonidos. Estos sensores emiten ondas sonoras constantemente. Cuando estas ondas impactan con objetos, estos sensores captan el rebote. De esta manera, midiendo la diferencia entre la onda emitida y captada, el vehículo mide distancias y detecta obstáculos próximos. El problema que encontramos en estos sensores es que su eficacia es máxima solo en bajas velocidades y obstáculos relativamente cercanos.
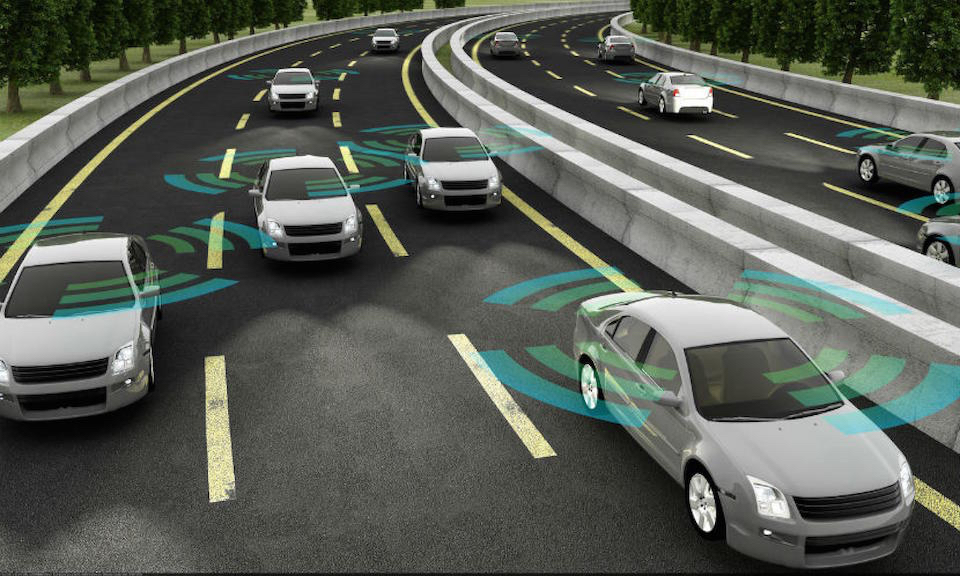
Sensores de imagen. Todos los vehículos autónomos cuentan con un conjunto de cámaras distribuidas alrededor del coche que generan una imagen en tres dimensiones de alrededor del vehículo. Estos sensores (o cámaras) son las encargadas de captar las líneas de la carretera, señales de tráfico, diferentes obstáculos e información muy diversa que apoya y complementan al resto de sensores.
LiDAR. Este sistema de visión, basado en láser, tiene capacidad de generar millones de haces, ofreciendo una visión de 360 grados y un gran alcance (aproximadamente la longitud de dos campos de fútbol alrededor del coche). El sensor detecta formas y genera un mapa 3D del entorno del vehículo en tiempo real.
Todos estos sensores se complementarán con otros más comunes, como el GPS, para poder estar geolocalizado en todo momento; micrófonos y sensores de sonido, para aportar más información del entorno a los algoritmos; y giroscopios y acelerómetros, que permitirán controlar la orientación en un espacio tridimensional y la velocidad y dirección de desplazamiento.
La importancia del software
Todos estos sensores no tendrán lógica alguna sin un ordenador central, que ejerce de cerebro del vehículo autónomo. Aquí se procesan todas las señales que provienen de todos los sensores y sistemas del coche.
El software que incorpora este ordenador central és el encargado de procesar la información y tomar las decisiones importantes a la hora de guiar el vehículo y aquí es donde entra la Inteligencia Artificial.
Desde el punto de vista de vehículos autónomos, los campos que se centran en esto son las redes neuronales, en aprendizaje automático y la visión artificial.
Las redes neuronales en coches autónomos consisten en ir adquiriendo conocimiento en base a una serie de parámetros de entrada que van reajustando el sistema de algoritmos.
El aprendizaje automático es una de las partes más complejas dentro del proceso de creación de un vehículo autónomo. Al coche se le deberá de “enseñar” con diferentes situaciones y objetos las posibles situaciones que se pueda encontrar. El gran reto está en abarcar el mayor número de casos antes de que el coche pueda circular por las vías públicas.
La visión artificial es la parte más compleja del software y dónde más recursos se invierte. Consiste en adquirir, procesar y analizar imágenes del mundo real, con el fin de producir información de manera que pueda ser procesada por un ordenador. El entrenamiento de los algoritmos es la base para mejorar y perfeccionar los sistemas de visión artificial.
Como hemos visto, la tecnología actual ya permite que un vehículo pueda circular de forma autónoma por una carretera, pero todavía quedan muchas incógnitas por resolver: ¿Cómo será nuestra vida con un coche autónomo? ¿Cómo va a convivir un coche autónomo a uno convencional?
Y tu, ¿Cuándo crees que los coches autónomos invadirán nuestras carreteras?